Overview
Abstract
Recent advances in LLMs have significantly improved language-driven 3D scene generation, yet existing approaches primarily focus on scene synthesis and treat user interaction
as a separate process, limiting the adaptability and immersive potential of interactive multimedia systems.
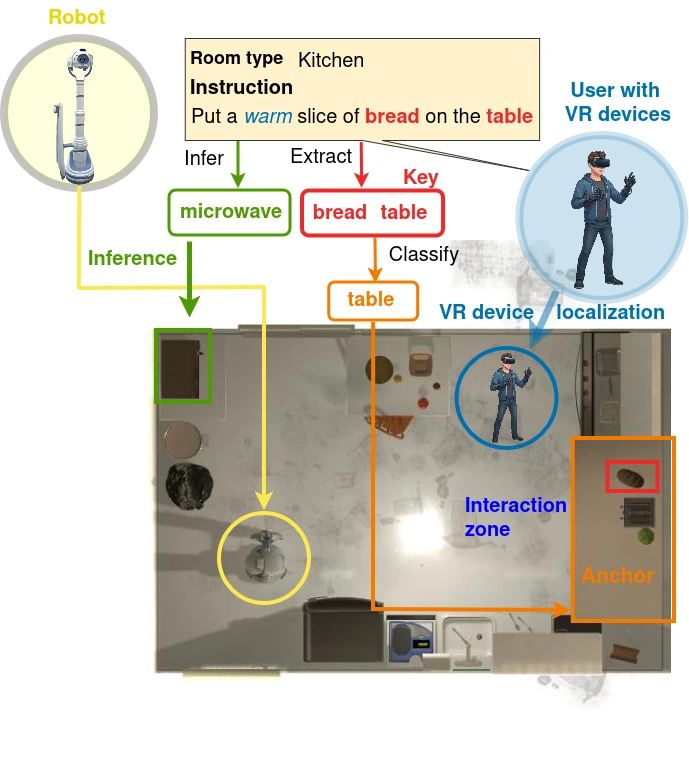
This paper presents a unified framework that closes the loop between language-driven scene generation and immersive human-robot interaction in virtual reality.
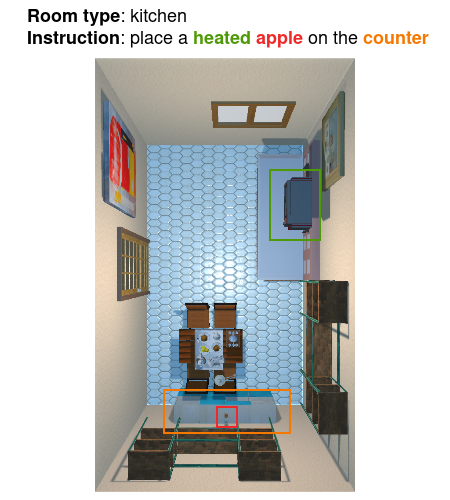
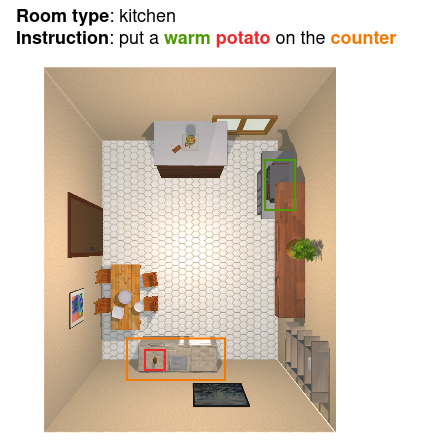
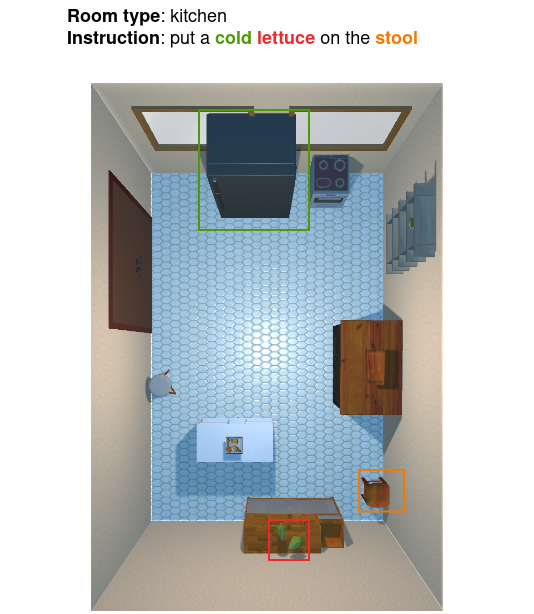
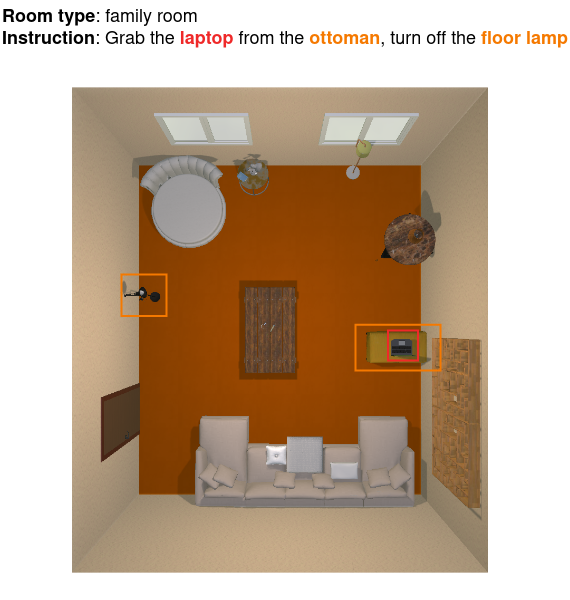
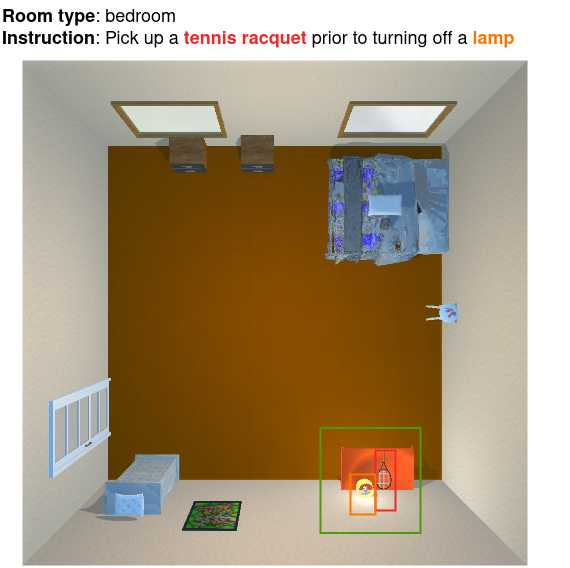
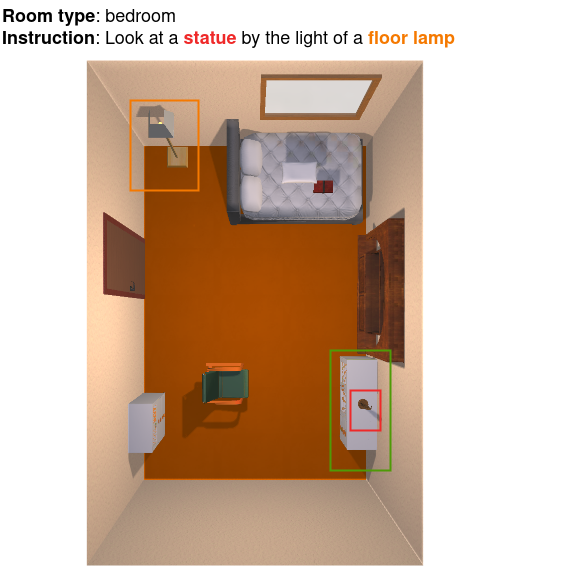
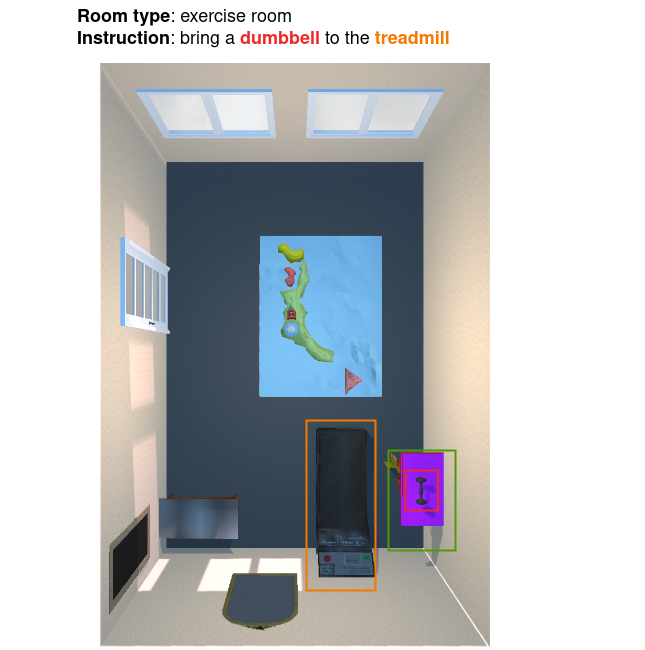
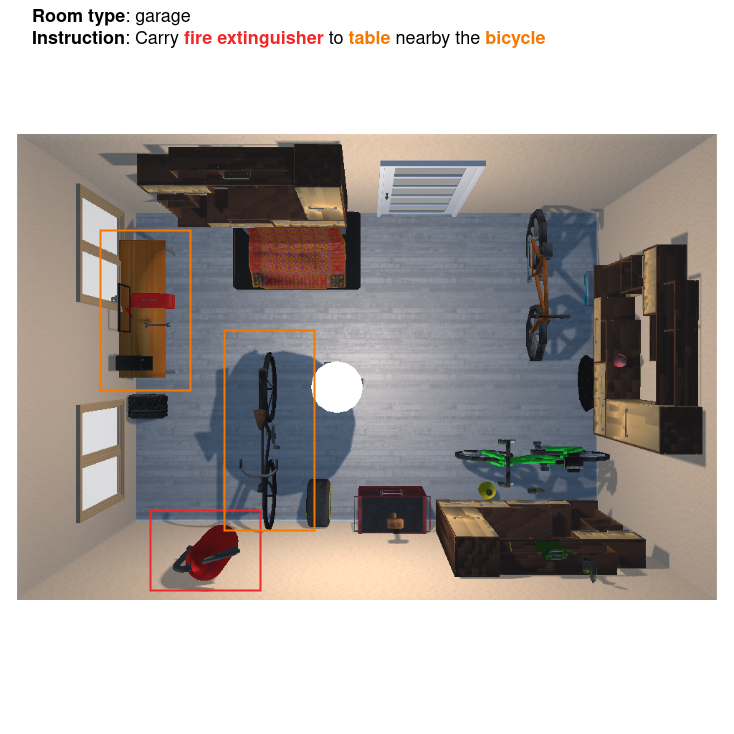
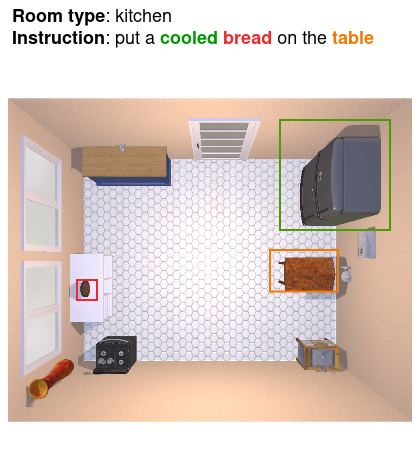
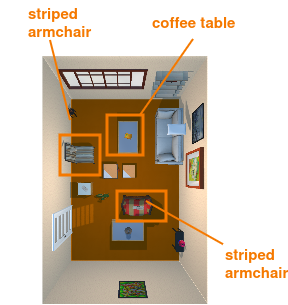
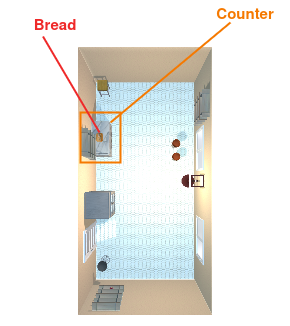
Given a natural language instruction, the proposed framework constructs a structured scene representation via an LLM-based Language-Driven Scene Representation module,
predicts interaction-relevant viewpoints through a VR-aware model,
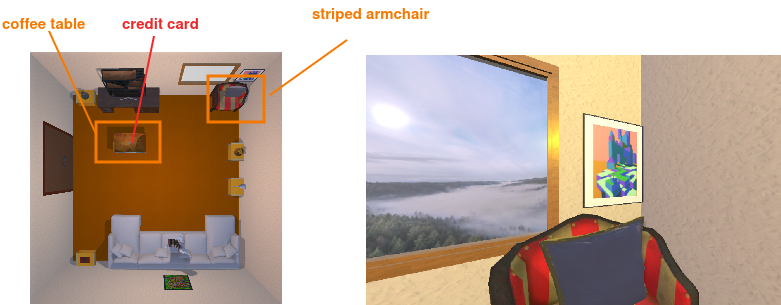
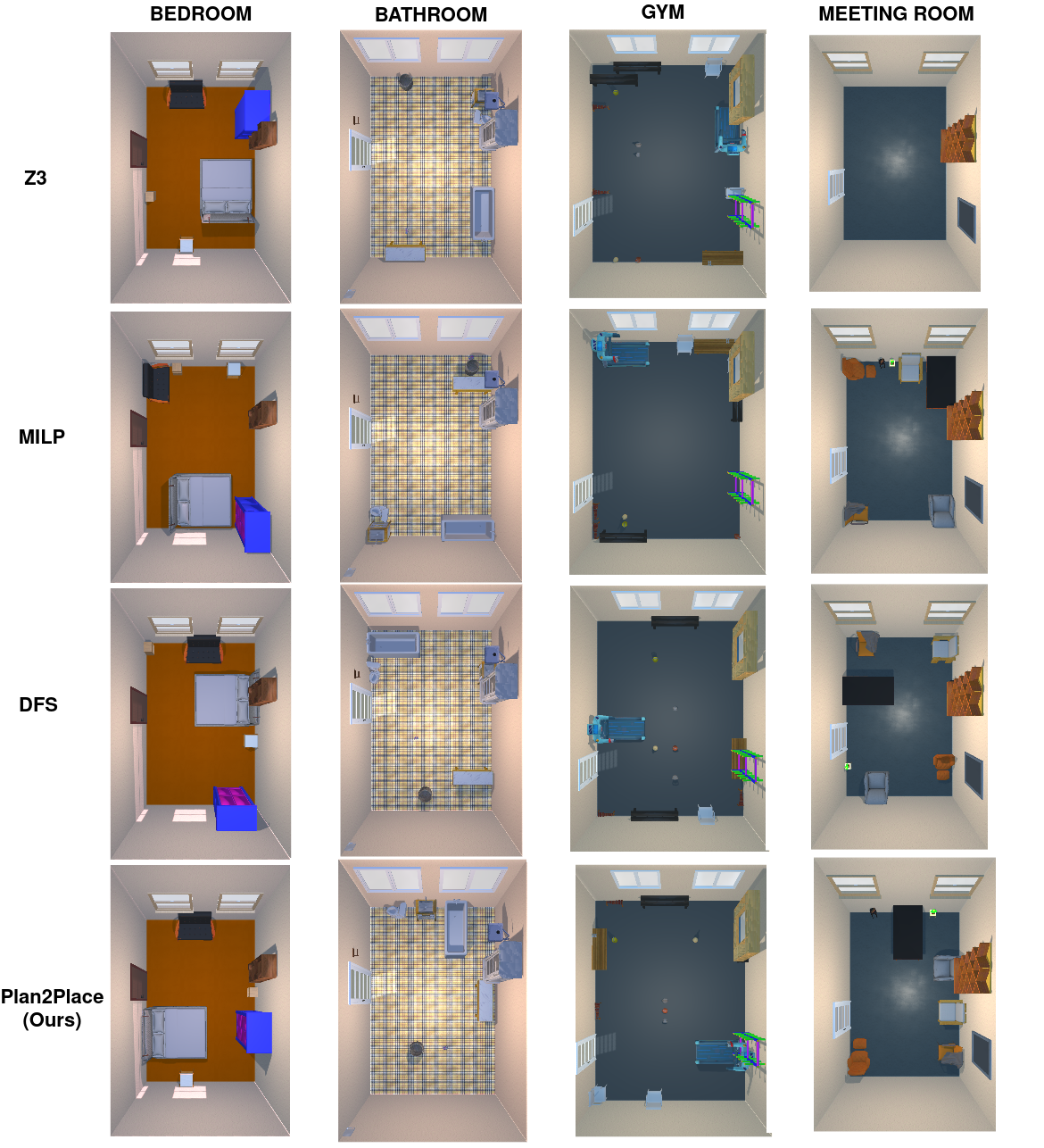
and optimizes object arrangements under semantic and geometric constraints via a reinforcement learning-based Plan2Place module.
The generated environments are deployed in VR, where users interact through visual and haptic feedback, making interaction a first-class constraint in scene generation by design.
Experiments on the ALFRED benchmark demonstrate state-of-the-art performance in task-based scene generation, object placement, and VR
localization, while user studies confirm consistent improvements in immersion, interaction quality, and task efficiency.